

一、产品定位
工业机器人离线编程仿真软件针对市场在工业机器人工作站布局规划、机器人及周边设备选型、机器人应用仿真等方面技术人才的迫切需求而设计,通过构建机器人应用工作站虚拟场景,进行工作站布局规划、机器人及周边设备选型、机器人应用仿真、节拍测算、工艺分析、方案验证、方案优化改进和方案展示等工作,可对接机器人编程和操作,安装调试,故障检测维护等岗位,充分体现教学与实践结合的特色。
二、仿真案例
汇博机器人以HBRoboDK为核心,面向工业机器人虚拟仿真及离线编程教学方向,结合实际工业应用案例,将大量真实的工业机器人应用案例及智能制造应用案例转化为软件教学资源,包含机器人搬运、码垛、打磨、焊接、喷涂、雕刻等机器人应用案例。通过实训,学生不仅可以掌握工业机器人的操作、编程与调试,而且可以熟悉工业机器人典型应用的组成、工艺、工作流程和关键技术,并掌握工业机器人典型应用的方案设计、布局优化、虚拟仿真及离线编程等知识。
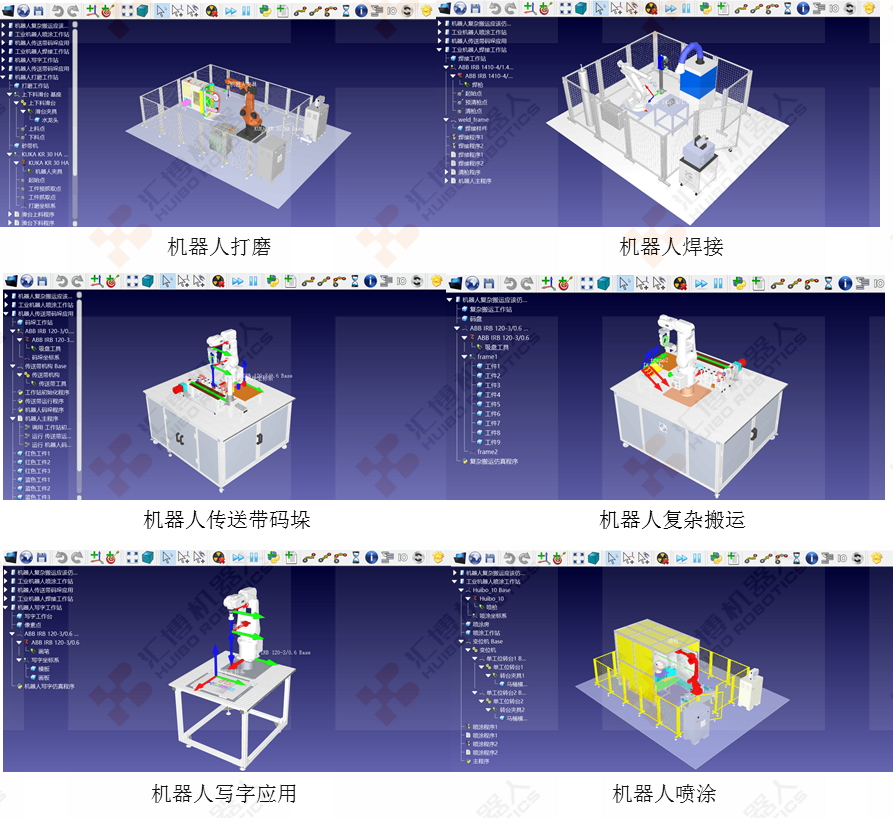
图2-1 工业机器人离线编程仿真软件HBRoboDK仿真案例示例
HBRoboDK支持国内外大多数机器人品牌的机器人模型,包括汇博机器人、埃夫特、ABB、KUKA、FANUC、安川、UR、柯马等。支持串联机器人、DELTA、SCARA、直角坐标等不同类型的机器人模型,也支持机器人外部轴,包括直线滑轨和旋转变位机。并且支持根据自定义的机器人参数创建相应的机器人模型。
2、功能丰富
支持导入step、igs、stl、3ds、wrml等格式的CAD模型;具有数控加工中心、AGV、仓库码垛机、传送带等运动机构模型库,同时支持三维模型创建相应的运动机构;支持多种编程模式,手持工具和手持工件等;支持基于Python的RoboDK API的编程;具有ABB、KUKA、FANUC和安川机器人等品牌的虚拟示教器,支持和实际机器人一致的操作与编程;支持机器人上下料、机器人打磨、机器人焊接、机器人雕刻、机器人3D打印等应用的离线编程。
3、丰富的轨迹调整优化工具包
HBRoboDK提供丰富的轨迹调整优化工具包,如碰撞检测、机器人可达性检测、机器人奇异位置检测、节拍估算、轨迹自动调整优化等功能。
4、配套教学资源丰富
配备7个实训项目、7套配套模型、12个PPT、12个视频、1本出版教材、1本实训指导书等教学资源,便于院校师生开展教学、实训实践、培训等工作。
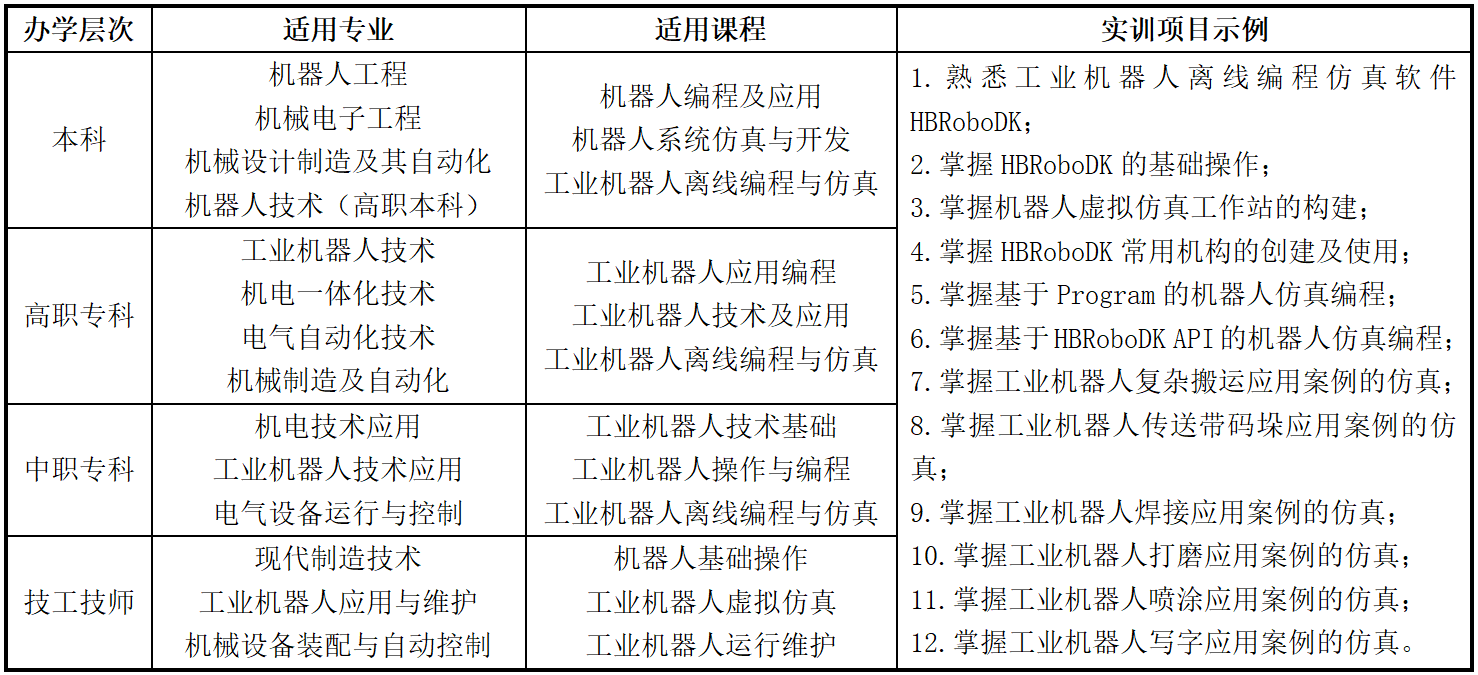
四、适用专业及课程
 苏公网安备32059002004848
苏公网安备32059002004848









